 |
上海优爱宝智能机器人科技股份有限公司
主营产品: 步进电机驱动器 |

|
上海优爱宝智能机器人科技股份有限公司
主营产品: 步进电机驱动器 |
| 参考价 | 面议 |
塑料机械网采购部电话:0571-88918531 QQ:2568841715
QQ:2568841715
联系方式:查看联系方式
更新时间:2016-06-22 13:33:07浏览次数:902
联系我们时请说明是塑料机械网上看到的信息,谢谢!
采用优质冷轧钢片和耐高温永磁体制造,具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。按定子上绕组来分,共有二相、三相和五相等系列。的是两相混合式步进电机,约占97%以上的*,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。建议用户在选择驱动器时选择硬件细分型驱动器,因为硬件细分可作精确定位,而软件细分只是降低电机的震动噪音,并不能用作精确定位。
判断需多大力矩:静扭矩是选择步进电机的主要参数之一。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。判断电机运转速度:转速要求高时,应选相电流较大、电感较小的电机,以增加功率输入。且在选择驱动器时采用较高供电电压。选择电机的安装规格:如42、57、86、110等,主要与力矩要求有关。
确定定位精度和振动方面的要求情况:判断是否需细分,需多少细分。根据电机的电流、细分和供电电压选择驱动器。
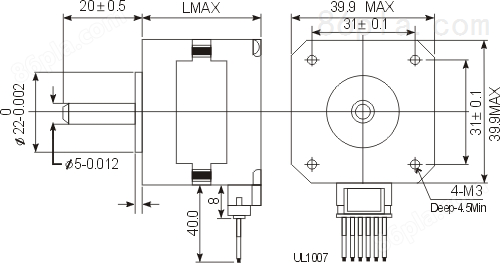
主要技术参数
项目 | 性能 |
步矩角 | 1.8 |
步距角精度 | ±5%(整步,无负载) |
电阻精度 | ±10% |
电感公差 | ±20% |
温升 | 80℃Max.(rated current,2 phase on) |
工作环境温度 | -10℃-+50℃ |
绝缘电阻 | zui小100MΩ., 500VDC |
介电强度 | 500VAC 1分钟 |
径向跳动 | 0.06Max.(450 g-load) |
轴向跳动 | 0.08Max.(450 g-load) |
技术规格
型号 | 电压 | 电流 | 电阻 | 电感 | zui大静力矩 | 引线 | 转动惯量 | 重量 | 长度 | 适配驱动器 | |
单出轴 | V | A | Ω | Mh | Oz-in | g-cm |
| g-cm2 | kg | mm |
|
UI39STH20-0404A | 2.64 | 0.4 | 6.6 | 7.5 | 9 | 650 | 4 | 11 | 0.12 | 20 | UIM240X |
UI39STH28-0654A | 4.55 | 065 | 7 | 9.3 | 25 | 1800 | 4 | 20 | 0.18 | 34 | |
UI39STH38-0804A | 6 | 0.8 | 7.5 | 16 | 44 | 3200 | 4 | 28 | 0.2 | 38 | |
UI39STH44-0304A | 12 | 0.3 | 40 | 100 | 39 | 2800 | 4 | 36 | 0.25 | 44 | |
*以上仅为代表性产品,派生产品根据客户要求制作。
http://uirobot.com/cn/pro/2/3/79.html