注塑机 挤出机 造粒机 吹膜机 吹塑机 吹瓶机 成型机 吸塑机 滚塑机 管材生产线 板材生产线 型材生产线 片材生产线 发泡设备 塑料压延机
安徽合动智能科技有限公司

安徽合动智能科技有限公司
暂无信息 |
一、概述 ACS506伺服驱动器是一款全新直流供电的高性能、低压、交流数字伺服驱动器,采用TITMS320F28069DSP芯片作为主处理器,能实现直流无刷电机、轮毂伺服电机、交流伺服电机、永磁同步电机的电流、速度、位置精确控制
一、 概述
ACS506伺服驱动器是一款全新直流供电的高性能、低压、交流数字伺服驱动器,采用TI TMS320F28069 DSP芯片作为主处理器,能实现直流无刷电机、轮毂伺服电机、交流伺服电机、永磁同步电机的电流、速度、位置精确控制。
该驱动器具有高动态性能,高达30A峰值电流,平滑的低速性能,强的抗力,并具备欠压、过压、过载、过流、堵转、Hall或编码器异常报警等功能,伺服性能达到国内外伺服驱动器的水平。
驱动器体积小巧,安装和调试简单方便。通过驱动器调试软件,用户可以轻松匹配电机和伺服驱动器的基本参数,更改电机控制模式、比例增益等,实现对电机的精确控制。
驱动器为用户提供一种高性价比、功能可以定制开发的伺服驱动、控制解决方案,在确保稳定可靠的前提下,追求最贴近应用的性能。
二 、技术参数
| 型号参数 | ACS506 | |
| 电源 | 动力电源 | 24VDC~60VDC(典型48V) |
| 逻辑电源 | 从动力电源转换 | |
| 电流 | 连续输出电流(Arms) | 15A |
| 峰值电流(PEAK) | 30A | |
| 反馈信号 | 可支持增量式光电编码器,BISS协议的多圈值编码器 | |
| 能耗制动 | 需要外接制动电阻(根据实际情况而定) | |
| 能耗制动电压吸收点 | 可设置 | |
| 过压报警 | 可设置 | |
| 欠压报警 | 20V±2V | |
| 冷却方式 | 风冷 | |
| 重量(KG) | 0.2KG | |
| 通 用 功 能 | 输入规格 | 3路输入,低电平有效 |
| 输入功能 | 驱动器使能、脉冲输入,方向输入 | |
| 输出规格 | 1路数字输出 | |
| 输出功能 | 固定为驱动器故障输出 | |
| 编码器信号输出功能 | 可输出A、B、Z信号,可用于主从跟随和反馈编码器位置信息 | |
| RS232 | 支持115200波特率,使用自定义协议与控制器通讯 | |
| 保护功能 | 超速、过流、过压、欠压、过载、超差、编码器故障、温 度过高、内部芯片故障、模块故障 | |
| CAN BUS | 支持1M波特率,采用自定义的协议进行控制,简单便携,也可以使用CANopen协议与控制器通讯(货期2-3个月) | |
| EtherCAT | 支持CoE(CiA402协议)(货期2-3个月) | |
| 使 | 工作温度 | 0-40℃ |
| 保存温度 | -10 - 70 ℃ | |
| 湿度 | 40%~80%无结露 | |
| 保护等级 | IP20 | |
| 安装场所 | 无粉尘干燥 | |
| 安装方式 | 垂直安装 | |
| 高度 | 1000m以下 | |
| 大气压 | 86kpa - 106kpa | |
三、电气连接
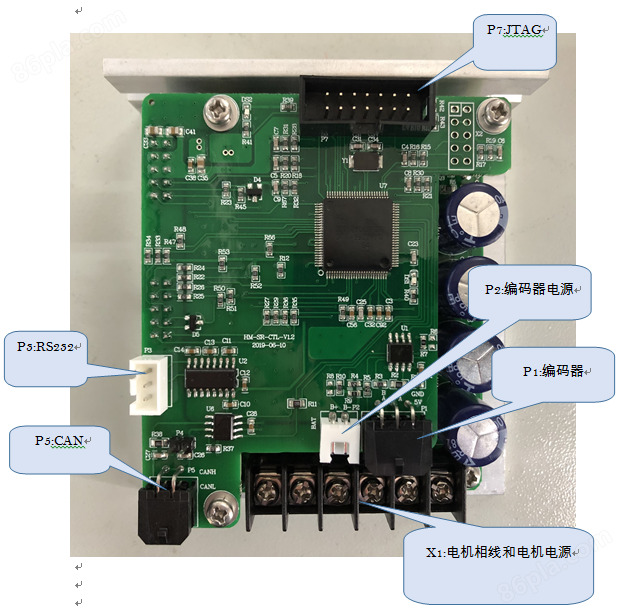
四、接口说明
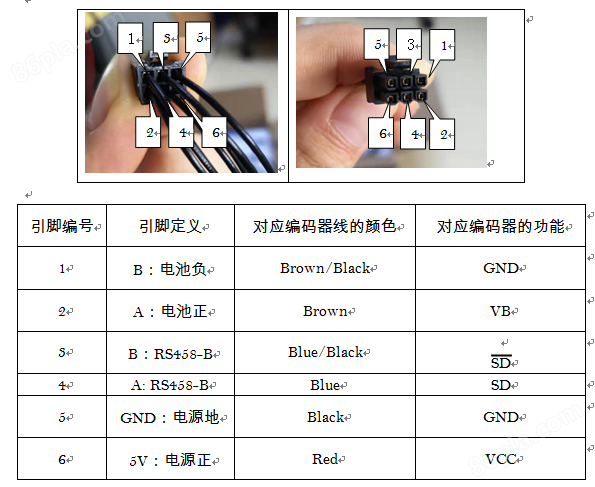
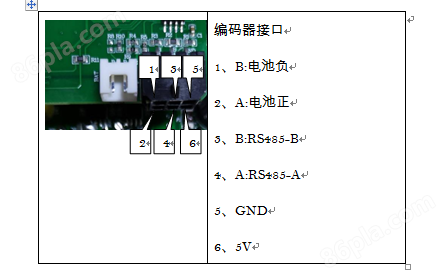
(一)编码器接线管脚定义
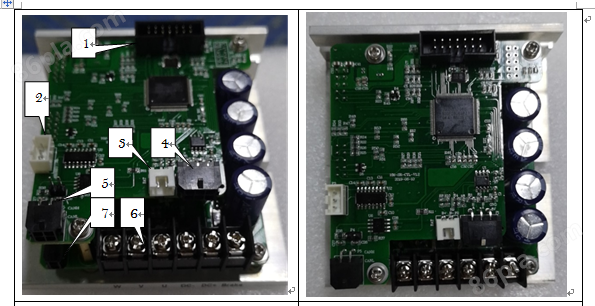
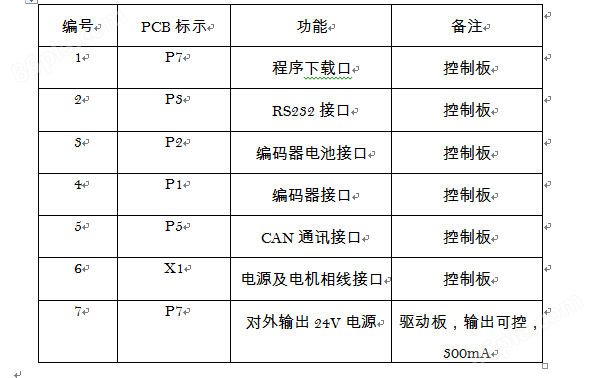
(三)接线端子定义介绍
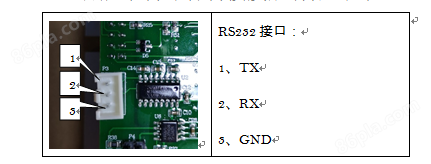
3.1 控制板P3
3.2 控制板P2

3.3 控制板P1
3.4 控制板P5
3.5 功率板X1
3.6 功率板P7
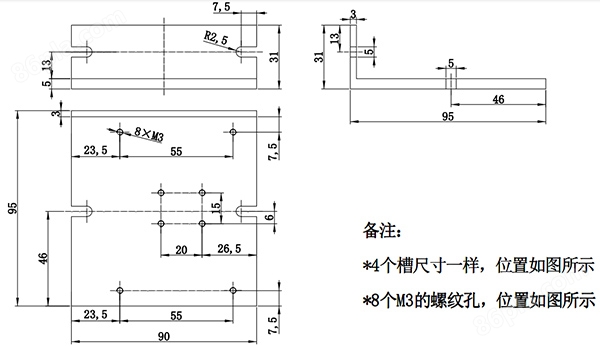
五、安装尺寸
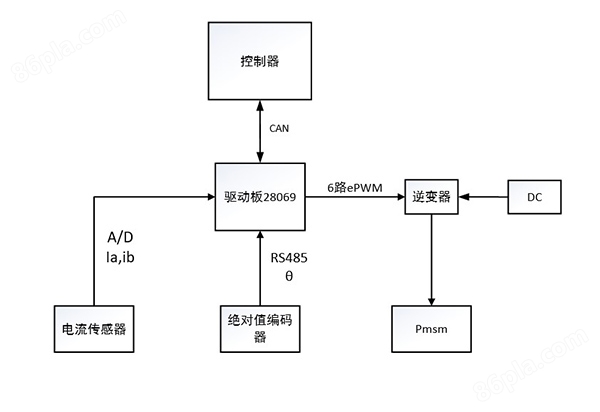
六、系统框架图
七、CAN通讯
(一)连接USB_CAN
将USB_CAN接线的USB端连接到计算机的USB 接口,CANH和CANL连接到驱动器的CAN通讯接口。
(二)控制程序的使用
1.打开CAN通讯软件“USB_CAN",点击<模式选择>选择正常模式,点击<波特率>选择1M,再点击<设置>。
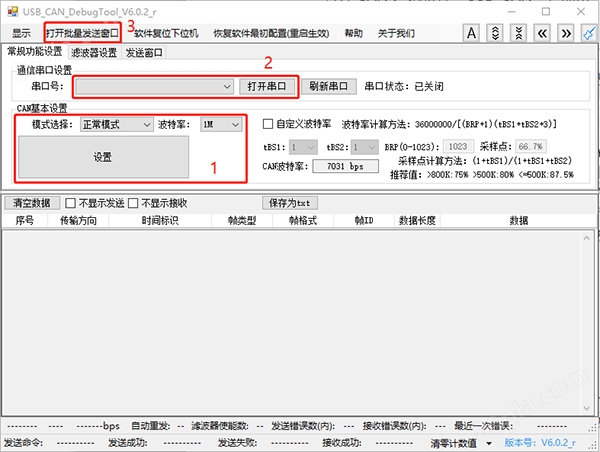
2.点击<串口号>选择正确的串口并点击<打开串口>。
3.点击<打开批量发送窗口>弹出控制界面。
下表是对数据栏的具体说明
| 位 | 值 | 说明 |
| 字节 | 11H、12H | 访问的起始地址值 |
| 第二字节 | 00H | 空 |
| 第三字节 | 00H——1FH | 相应地址下的索引 |
| 第四字节 | 00H、40H | 00为写操作,40为读操作 |
| 后四个字节 | 根据实际物理量设定 | 写入的参数值数据 |
(三)CAN ID设置
在地址12H的索引01H中,发送1-127的数据可将CAN地址改为0x300+(1-127)的地址。
CAN ID设置指令
12 00 01 00 xx 00 00 00
(四)使能和失能
驱动器与电机连接上电后,需要发送控制使能命令,电机进入位置环模式。三环工作模式需要在失能状态下切换。
控制使能命令
11 00 09 00 00 00 00 00
控制失能命令
11 00 0A 00 00 00 00 00
(五)故障代码
驱动电机出现故障时,驱动的故障指示灯会闪烁并且报故障代码。故障代码会存储起来,掉电不丢失。若有故障重新上电,需要清除故障代码。
| 变量:故障代码 | Error_I |
|
| 0 |
| 1:相电流瞬时值大于 35 A | 0x0001 |
| 2:编码器故障 | 0x0002 |
| 4:欠压,低于 24V | 0x0004 |
| 8:过压,高于 55V | 0x0008 |
| 16:位置误差超过设定值 | 0x0010 |
| 32:缺相或是电流冲击过大或是角度异常,电流环参数PI 不匹配也会造成该故障 | 0x0020 |
| 64:相线接错、堵转保护 | 0x0040 |
| 128:母线电压高于50V | 0x0080 |
| 256:编码器电池掉电 | 0x0100 |
读取故障代码
0000030X 12 00 11 40 00 00 00 00
故障代码清除
(七)控制环配置说明
驱动器使用最多三个嵌套的控制循环:电流、速度和位置,以三种相关的工作模式控制电机。在位置模式下,使用所有三个回路。在典型系统中,位置环驱动嵌套的速度环,速度环驱动嵌套的电流环。
在
读CAN ID指令
0000030X 12 00 01 40 00 00 00 00
变量:can接受帧数据CAN_DataRx[4]
起始地址(ADR)0
索引 (Index) 1
数据低16位2
数据高16位3
1. 电流环配置
(1) 运行模式在地址12H下,索引02H的位置,电流环模式为1,<设置模式>选项中发送数据“12 00 02 00 01 00 00 00"使驱动器运行为电流环模式。
地址索引设置值说明
12H02H01H电流环
(2) 电流设定在地址11H下,索引00H的位置,单位为0.01A。
电流大小设置 0000030X 11 00 00 00 xx xx 00 00
电流环KP设置 0000030X 12 00 07 00 xx xx 00 00
电流环KI设置 0000030X 12 00 08 00 xx xx 00 00
例如运行电流环为1A,<电流设置>选项中发送数据“11 00 00 00 64 00 00 00"。
地址索引设置值单位范围说明
11H00H64H0.01A±3000电流大小
12H07H3500电流环KP
12H08H25电流环KI
(3) 读取电流相关参数的地址在11H下,单位为0.01A。例如读取实际电流Iq,<读电流设置>选项中发送数据“11 00 10 40 00 00 00 00"。
地址索引单位说明
11H10H0.01A实际电流Iq
11H13H0.01A实际电流Id
11H18HU相电流
11H19HV相电流
2. 速度环配置
(1) 运行模式在地址12H下,索引02H的位置,速度环模式为2,<设置模式>选项中发送数据“12 00 02 00 02 00 00 00"使驱动器运行为速度环模式。
地址索引设置值说明
12H02H02H速度环
(2) 速度设定在地址11H下,索引01H的位置,单位为0.1RPM。
速度大小设置 0000030X 11 00 01 00 xx xx 00 00
速度环KP设置 0000030X 12 00 0A 00 xx xx 00 00
速度环KI设置 0000030X 12 00 0B 00 xx xx 00 00
例如运行速度环为10RPM,<速度设置>选项中发送数据“11 00 01 00 64 00 00 00"。
地址索引设置值单位范围说明
11H01H64H0.1RPM±3000电机转速
12H0AH3000速度环KP
12H0BH15速度环KI
(3) 读取速度相关参数的地址在11H下,单位为0.1RPM。例如读取实际速度大小,<读电流>选项中发送数据“11 00 11 40 00 00 00 00"。
地址索引单位说明
11H11H0.1RPM实际速度
11H14H0.1RPM速度偏差
3. 位置环配置
(1) 运行模式在地址12H下,索引02H的位置,位置环模式为3,<设置模式>选项中发送数据“12 00 02 00 03 00 00 00"使驱动器运行为位置环模式。
地址索引设置值说明
12H02H03H位置环
(2) 位置设定的起始地址为11H,索引02H的位置。
位置环模式设置 0000030X 12 00 03 00 0x 00 00 00
位置大小设置 0000030X 11 00 02 00 xx xx xx xx
位置环KP设置 0000030X 12 00 0D 00 xx xx 00 00
例如运行位置为100,<位置设置>选项中发送数据“11 00 02 00 64 00 00 00"。
地址索引设置值单位范围说明
12H03H0-10:梯形加减速;1:五次多项式
12H04H10000.1RPM±3000位置环速度
12H05H2000加速度
12H0DH2000位置环KP
11H02H脉冲位置设定ptp
11H03H位置设定DF
11H04H10000运动时间DF
(3) 读取位置相关参数的地址在11H下。例如读取实际位置大小,<读位置>选项中发送数据“11 00 12 40 00 00 00 00"。
地址索引说明
11H12H实际位置
11H15H位置偏差
八、 附表-寄存器表说明
|
| 命令:0011H,以下索引对应实时变量,掉电丢失, |
|
|
| ||||
| 索引: | 索引: | 读/写 | 指令功能 | 默认值 | 单位 | 范围 | 变量:can | CAN_DataRx[4]: |
| 0 | 0 | 读/写 | 电流设定(电流模式) | 0 | 0.01A | ±1500 | 命令(ADR) | 0 |
| 1 | 1 | 读/写 | 速度设定(速度模式) | 0 | 0.1RPM | ±2400 | 索引 (Index) | 1 |
| 2 | 2 | 读/写 | 位置设定ptp | 0 | 脉冲 | ±31位 | 数据低16位 | 2 |
| 3 | 3 | 读/写 | 位置设定DF | 0 | 脉冲 |
| 数据高16位 | 3 |
| 4 | 4 | 读/写 | 运动时间DF | 4000 |
|
| 案例: 如上文所示 | |
| 5 | 5 | 读/写 | 五次多项式时间系数 | 1000 |
|
| ||
| 6 | 6 | 读/写 | 电流环与速度环使能 | 0 | 使能:5 |
| ||
| 7 | 7 | 读/写 | 电机急停 | 0 |
|
| ||
| 8 | 8 | 读/写 | 一般故障代码清除 | 0 | 0:保留 |
|
|
|
| 9 | 9 | 读/写 | 控制使能命令 | 0 | 使能 |
|
|
|
| A | 10 | 读/写 | 控制失能命令 | 0 | 失能 |
|
|
|
| B | 11 | 读/写 | Can通讯上传时间设置 | 1000 | *0.16ms |
|
|
|
| C | 12 | 读/写 | 编码器丢掉故障清除 | 0 | 0:保留 |
|
|
|
| D | 13 | 读/写 |
| 0 |
|
|
|
|
| E | 14 | 读/写 |
| 0 | 0 |
| 变量:故障代码 | Error_I |
| F | 15 | 读/写 | 24V输出 | 0 |
|
|
| 0 |
| 10 | 16 | 读 | 电流Iq实际 | 0 | 0.01A |
| 1:相电流瞬时值大于 35 A | 0x0001 |
| 11 | 17 | 读 | 速度实际 | 0 | 0.1RPM |
| 2:编码器故障 | 0x0002 |
| 12 | 18 | 读 | 位置实际 | 0 | 脉冲 |
| 4:欠压,低于 24V | 0x0004 |
| 13 | 19 | 读 | 电流Id实际 | 0 | 0.01A |
| 8:过压,高于 55V | 0x0008 |
| 14 | 20 | 读 | 速度偏差 | 0 | 0.1RPM |
| 16:位置误差超过设定值 | 0x0010 |
| 15 | 21 | 读 | 位置偏差 | 0 | 脉冲 |
| 32:缺相或是电流冲击过大或是角度异常,电流环参数PI 不匹配也会造成该故障 | 0x0020 |
| 16 | 22 | 读 | Error_I | 0 | 故障代码 |
| 64:相线接错、堵转保护 | 0x0040 |
| 17 | 23 | 读 | 母线电压 | 0 | 0.1V |
| 128:母线电压高于50V | 0x0080 |
| 18 | 24 | 读 | U相电流 | 0 |
|
| 256:编码器电池掉电 | 0x0100 |
| 19 | 25 | 读 | V相电流 | 0 |
|
|
|
|
| 1A | 26 | 读 | 电池电压 | 0 | 0.1V |
| 变量:EEPROM读取标志 | DataReadFlag |
| 1B | 27 | 读 | 电机是否运行 | 0 | 0:空闲 |
| 从eeprom读取数据 | 0 |
| 1C | 28 | 读 |
| 0 |
|
| 将默认值写进eeprom | 1 |
| 1D | 29 | 读 |
| 0 |
|
| 更新变量 | 2 |
| 1E | 30 | 读 | 电流测试 | 0 |
|
| 初始化CAN地址 | 3 |
| 1F | 31 | 读 | 速度测试 | 0 |
|
| 等待 | 4 |
|
|
|
|
|
|
|
|
|
|
|
| 命令:0012H,以下索引对应电机参数设定,掉电不丢失, |
|
|
| ||||
| 索引:十六进制 | 索引:十进制 | 读/写 | 名称 | 轴1-3默认参数 | 单位 | 轴 4默认参数 |
|
|
| 0 | 0 | 读/写 | 恢复默认值 | 1248 |
| 1235 |
|
|
| 1 | 1 | 读/写 | CAN_ID | 1 |
| 1 | 0x300+(1-127) |
|
| 2 | 2 | 读/写 | 运行模式 | 3 |
| 3 | 1:电流环;2:速度环; | |
| 3 | 3 | 读/写 | 位置环模式 | 1 |
| 0 | 0:T型加减速; | |
| 4 | 4 | 读/写 | 位置环T型加减速速度 | 2000 | 0.1rpm | 1000 |
|
|
| 5 | 5 | 读/写 | 加速度 | 2000 | 0.0001 | 2000 |
|
|
| 6 | 6 | 读/写 | 停止加速度 | 20 | 0.01 | 0 |
|
|
| 7 | 7 | 读/写 | 电流环P | 3000 |
| 5000 |
|
|
| 8 | 8 | 读/写 | 电流环I | 35 |
| 20 |
|
|
| 9 | 9 | 读/写 | 电流环D | 0 |
| 0 |
|
|
| A | 10 | 读/写 | 速度环P | 7000 |
| 20000 |
|
|
| B | 11 | 读/写 | 速度环I | 15 |
| 10 |
|
|
| C | 12 | 读/写 | 速度环D | 0 |
| 0 |
|
|
| D | 13 | 读/写 | 位置环P | 2000 | 0.00001 | 2000 |
|
|
| E | 14 | 读/写 | 位置环I | 0 | 0.00001 | 0 |
|
|
| F | 15 | 读/写 | 位置环D | 0 |
| 0 |
|
|
| 10 | 16 | 读/写 | 位置误差给定值 | 1000 | 脉冲 | 0 | 0-30000 |
|
| 11 | 17 | 读/写 |
| 0 |
| 0 |
|
|
| 12 | 18 | 读/写 |
| 0 |
| 0 |
|
|
| 13 | 19 | 读/写 | 速度滤波 | 20 | 10-80 | 10 |
|
|
| 14 | 20 | 读/写 | 硬件过流值 | 2800 | 0.01A | 2800 |
|
|
| 15 | 21 | 读/写 | 额定电流 | 1500 | 0.01A | 1500 |
|
|
| 16 | 22 | 读/写 | 峰值电流 | 2500 | 0.01A | 2500 |
|
|
| 17 | 23 | 读/写 | 低压保护值 | 240 | 0.1V | 240 |
|
|
| 18 | 24 | 读/写 | 高压保护值 | 550 | 0.1V | 550 |
|
|
| 19 | 25 | 读/写 | 制动电阻工作电压 | 500 | 0.1V | 500 |
|
|
| 1A | 26 | 读/写 |
|
|
|
|
|
|
| 1B | 27 | 读/写 | 堵转电流保护值 | 1500 |
| 0 | 堵转或相线接线保护值 |
|
| 1C | 28 | 读/写 |
| 0 |
| 0 |
|
|
| 1D | 29 | 读/写 |
| 0 |
| 0 |
|
|
| 1E | 30 | 读/写 |
| 0 |
| 0 |
|
|
| 1F | 31 | 读/写 |
| 0 |
| 0 |
|
|
九、可能出现的问题及解决办法
1、电机上电使能后,报64故障;原因:电机相线接错。
2、电机运行过程中,报64故障;原因:电机负载大,可以修改堵转保护值,默认值为:1500(峰值),适当放大些。
3、电机上电使能后,报32故障;原因:电流环或速度环PI参数不合适;在不影响位置精度的情况下,可以先适当减小速度环P参数;如果没有效果,开始减小电流环P参数。
4、电机上电使能后,报128故障;原因:开关电源会有一定的纹波,功率越大纹波越大,可以调低开关电源输出电压;或将制动电阻工作电压保护值设高些;默认是50V(500)。
5、电机在运行过程中,有突然停止的情况;原因:电机在测试电流环或速度环后,编码器计数值太大,在五次多项式计算后,有些参数可能会溢出。在电机做过电流环或速度环测试后,给驱动器断电,同时将编码器电池拨掉再插好。
6、在位置环运行中,电机加速度过慢; 原因:可以适当减小0011H里,运行时间DF值(默认4000);或加大0011H里,五次式项式时间系数值(默认1000)。
您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN
塑料机械网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码