注塑机 挤出机 造粒机 吹膜机 吹塑机 吹瓶机 成型机 吸塑机 滚塑机 管材生产线 板材生产线 型材生产线 片材生产线 发泡设备 塑料压延机
安徽合动智能科技有限公司

安徽合动智能科技有限公司
暂无信息 |
技术参数一、机械臂本体参数1
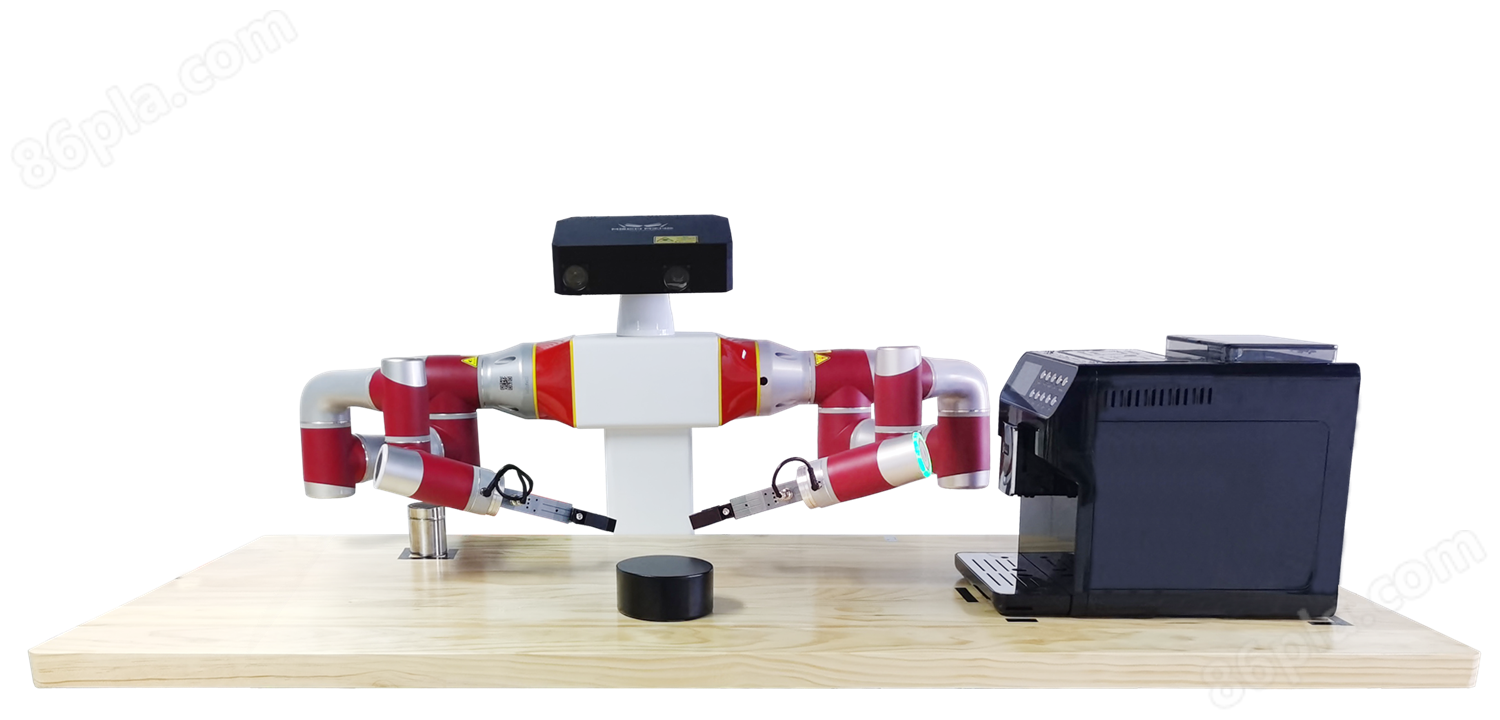
技术参数
一、机械臂本体参数
1.重复定位精度:±0.1mm
2.环境湿度:25-85%(无冷凝)
3.环境温度:-20-45℃
4.功耗:150w(普通工况下)
5.额定寿命:30000h
6.自由度:6
7.工作半径:610mm
8.负载:3kg
9.供电电源:DC48V
10.六轴参数:
J1-J5基座 工作范围:±360°速度:±180°
J6-腕部 工作范围:±360°速度:±300°
11.关节模组可以打开,可以进行拆装,可以自由组合,可提供关节模组打开的内部结构图片并能清晰看到驱动器、编码器。
二、驱动系统功能
1.控制方式:串口、CAN总线
2.异常保护程序具备欠压、过压、过流、堵转、Hall或编码器异常保护功能及故障报警输出功能,提供相应Simulink软件模块
(6)具备FOC磁场定向控制算法软件模块,提供相应Simulink软件模块
(7)具备PID算法和电流、速度、位置三闭环算法软件模块,提供相应Simulink软件模块
三、控制系统
1.CPU:ARM Cortex-A8,主频1000MHz
2.ROM:4GByte eMMC
3.RAM:256M DDR3
4.Shared RAM:64KByte
5.SPI Flash:8MByte
6.3D图形加速器:SGX530
7.支持MATLAB/Simulink和 ROS联合开发,支持交叉编译
8.提供机械臂运动学仿真模型、实物控制算法模型,提供正解逆解、关节空间轨迹规划、笛卡尔空间轨迹规划实验案例
9.提供机械臂动力学仿真模型、实物控制算法模型,提供单关节和双关节的重力补偿、摩擦力补偿、零力拖动实验案例
10.提供动力学建模方法与程序,包括NEWTON-EULER程序与LAGRANGE程序,可自动计算出任意自由度的动力学模型方程和雅克比矩阵;提供动力学参数辨识方法与程序,提供截图证明;提供PID控制算法与程序,提供截图证明;提供鲁棒控制、自适应控制方法与程序
11.提供双臂协同的运动规划实验案例
四、开源双目视觉系统
1.尺寸:约为90mm × 25mm × 25mm;
2.重量:72-90g;
3.深度景深(FOV):87°±3°x 58°±1°x 95°±3°;
4.最小深度距离:0.105 m;
5.3D视觉系统采用Intel RealSense和OpenCV,提供开源边缘检测、轮廓检测、人脸检测、图像旋转缩放变换、相机标定、视觉抓取等实验案例和算法
五、高性能末端夹爪
1.有效行程:20mm(可调);
2.夹持力:80N(可调);
3.电机:伺服电机;
4.输入电压:DC24V;
5.控制方式:逻辑电平控制开合,脉冲控制行程;
六、监控软件
1.可采集Simulink程序中任意的变量数据,每关节3路共18路数据,并用波形显示,波形横轴长度可调节,波形数据可保存、可回放
2.可控制机械臂的关节角度、末端坐标以及关节和坐标的步进控制,可显示机械臂的关节角度、末端坐标
3.采用*的MBD的开发方式,可完成机器人运动学、动力学实验,提供机械臂动力学仿真模型、实物控制算法模型,提供单关节和双关节的重力补偿、摩擦力补偿、零力拖动实验案例
七、其它功能
开放电流环、速度环、位置环,提供驱动原理图;
您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN








塑料机械网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码





