注塑机 挤出机 造粒机 吹膜机 吹塑机 吹瓶机 成型机 吸塑机 滚塑机 管材生产线 板材生产线 型材生产线 片材生产线 发泡设备 塑料压延机
贝至科技(东莞)有限公司

贝至科技(东莞)有限公司
随着网络技巧的发展,机械手的联网操作问题也是以后发展的方向。工业机器人是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特
随着网络技巧的发展,机械手的联网操作问题也是以后发展的方向。工业机器人是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂区别就在于灵活度与耐力度。也就是机械手的可以重复的做同一动作在机械正常情况下永远也不会觉得累!机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。工业机械手机器人的一个重要分支。
种类,按驱动方式可分为液压式、气动式、电动式、机械式。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点.
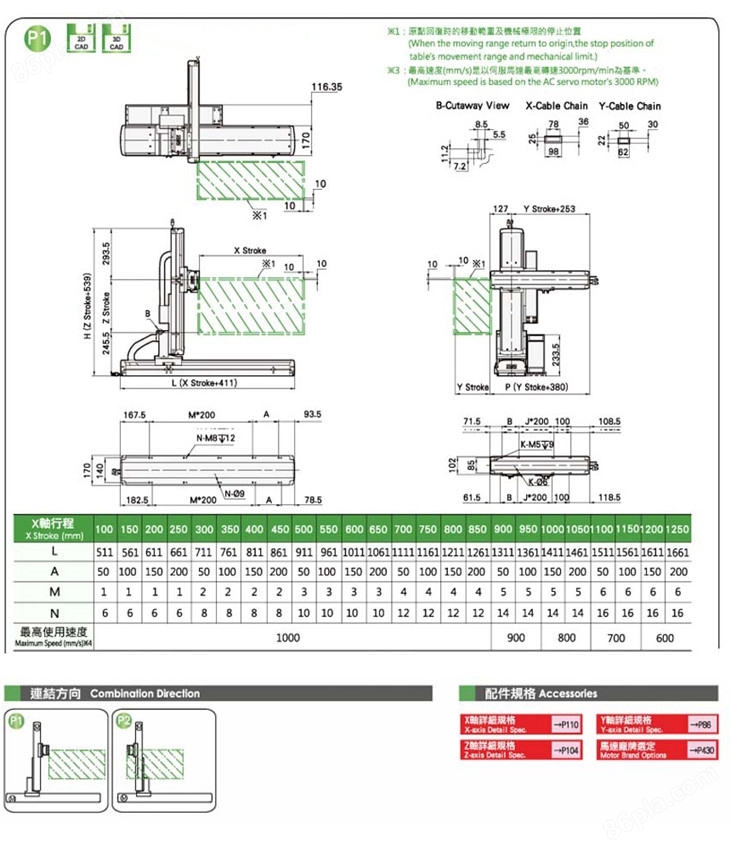
 XYTH764-A三轴机械手规格参数:
XYTH764-A三轴机械手规格参数:
| 项目 | X轴 | Y轴 | Z轴 | ||||
| 轴型式 | ETH17 | ETH12 | ETH14 | ||||
| 位置重复精度(mm) | ±0.01 | ±0.01 | ±0.01 | ||||
| 螺杆导程(mm) | 20 | 10 | 10 | ||||
| 速度(mm/s)*3 | 1000 | 5000 | 500 | ||||
| 标准行程(50间隔)(mm) | 100-1250 | 50-350 | 50-650 | ||||
| AC伺服马达容量 | 400 | 100 | 400+刹车 | ||||
| 使用环境 | 0~40 ℃,85%RH Below | ||||||
| 标注;*3:速度(mm/s)是以伺服马达转速3000rpm/min为基准 | |||||||
| 可搬货量 | |||||||
| Y轴行程(mm) | |||||||
| Z轴行程荷重(kg) | 50 | 150 | 250 | 350 | |||
| 50-650 | 12 | 11 | 10 | 9 | |||
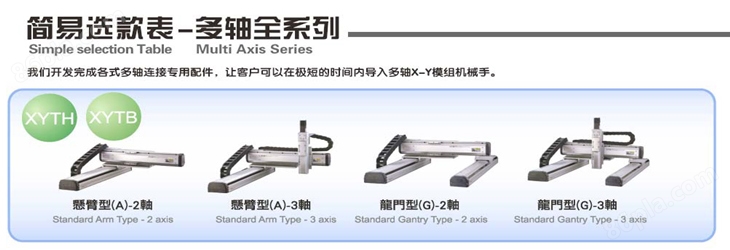
直角机械手型号参考表:
| 使用环境 | 传动方式 | 连接型式 | 连接轴数 | 样式 | X轴 |
| 一 般 环 境 | 螺 杆 | 悬臂型(A) | 2轴 | XYTH210-A | 500 |
| XYTH430-A | 1000 | ||||
| XYTH440-A | 1000 | ||||
| XYTH650-A | 1000 | ||||
| XYTH760-A | 1000 | ||||
| XYTH870-A | 1000 | ||||
| 3轴 | XYTH442-A | 800 | |||
| XYTH653-A | 1000 | ||||
| XYTH764-A | 1000 | ||||
| XYTH876-A | 1250 | ||||
| 龙门型(G) | 2轴 | XYTH760-G | 1000 | ||
| XYTH870-G | 1250 | ||||
| 3轴 | XYTH764-G | 1000 | |||
| XYTH876-G | 1250 | ||||
| 极座标型(P) | 2轴 | XYTH650-P | 1000 | ||
| XYTH760-P | 1000 | ||||
| XYTH880-P | 1000 | ||||
| 3轴 | XYTH764-P | 1000 | |||
| XYTH886-P | 1250 | ||||
| 十字型(F) | 2轴 | XYTH530-F | 1000 | ||
| XYTH640-F | 1000 | ||||
| XYTH760-F | 1000 | ||||
| 皮 带 | 悬臂型(A) | 2轴 | XYTB650-A | 2000 | |
| XYTB760-A | 2000 | ||||
| XYTB870-A | 2000 | ||||
| 3轴 | XYTB653-A | 2000 | |||
| XYTB764-A | 2000 | ||||
| XYTB876-A | 2000 | ||||
| 龙门型(G) | 2轴 | XYTB870-G | 2000 | ||
| 3轴 | XYTB876-G | 2000 | |||
| 十字型(F) | 2轴 | XYTB630-F | 2000 | ||
| XYTB740-F | 2000 |
三轴机械手结构原理简介:
执行机构
机械手的执行机构分为手部、手臂、躯干;
1、手部
手部安装在手臂的前端。手臂的内孔中装有传动轴,可把运用传给手腕,以转动、伸曲手腕、开闭手指。
机械手手部的构造系模仿人的手指,分为无关节、固定关节和自由关节3种。手指的数量又可分为二指、三指、四指等,其中以二指用的最多。可根据夹持对象的形状和大小配备多种形状和大小的夹头以适应操作的需要。所谓没有手指的手部,一般都是指真空吸盘或磁性吸盘。
2、手臂
手臂的作用是引导手指准确地抓住工件,并运送到所需的位置上。为了使机械手能够正确地工作,手臂的3个自由度都要精确地定位。
3、躯干躯干是安装手臂、动力源和各种执行机构的支架。
驱动机构
机械手所用的驱动机构主要有4种:液压驱动、气压驱动、电气驱动和机械驱动。其中以液压驱动、气压驱动用得最多。
1、液压驱动式
液压驱动式机械手通常由液动机(各种油缸、油马达)、伺服阀、油泵、油箱等组成驱动系统,由驱动机械手执行机构进行工作。通常它的具有很大的抓举能力(高达几百千克以上),其特点是结构紧凑、动作平稳、耐冲击、耐震动、防爆性好,但液压元件要求有较高的制造精度和密封性能,否则漏油将污染环境。
2、气压驱动式
其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便、动作迅速、结构简单、造价较低、维修方便。但难以进行速度控制,气压不可太高,故抓举能力较低。
3、电气驱动式电力驱动是机械手使用得最多的一种驱动方式。其特点是电源方便,响应快,驱动力较大(关节型的持重已达400kg),信号检测、传动、处理方便,并可采用多种灵活的控制方案。驱动电机一般采用步进电机,直流伺服电机(AC)为主要的驱动方式。由于电机速度高,通常须采用减速机构(如谐波传动、RV摆线针轮传动、齿轮传动、螺旋传动和多杆机构等)。有些机械手已开始采用无减速机构的大转矩、低转速电机进行直接驱动(DD)这既可使机构简化,又可提高控制精度。
4、机械驱动式
机械驱动只用于动作固定的场合。一般用凸轮连杆机构来实现规定的动作。其特点是动作确实可靠,工作速度高,成本低,但不易于调整。其他还有采用混合驱动,即液-气或电-液混合驱动。
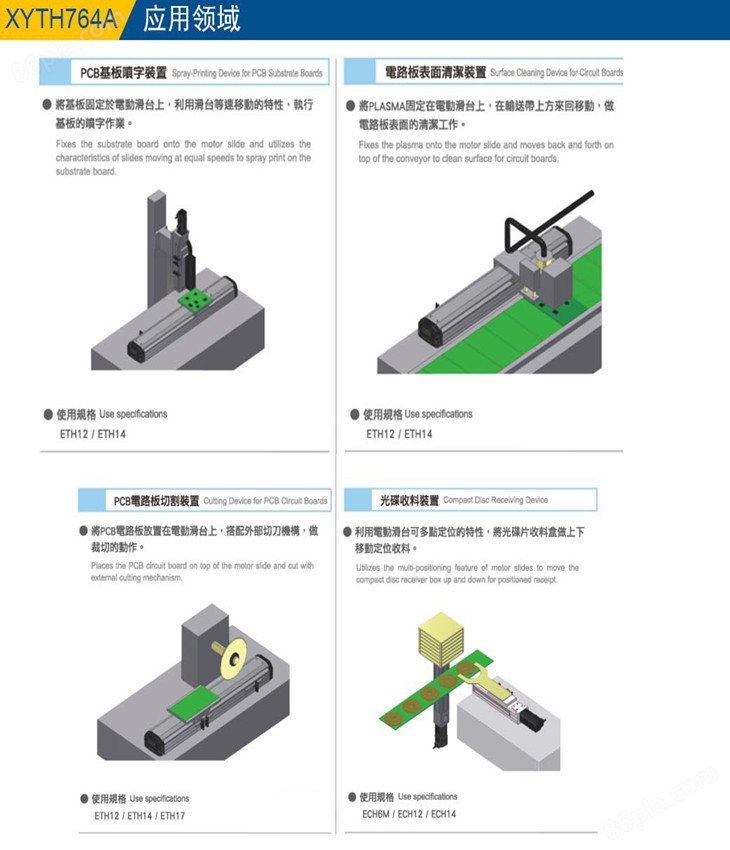
XYTH764A三轴机械手应用优势及领域:
三轴机械手可以减省工人、提高效率、降低成本、提高产品品质、安全性好、提升工厂形象。
多关节机械手的优点是:动作灵活、运动惯性小、通用性强、能抓取靠近机座的工件,并能绕过机体和工作机械之间的障碍物进行工作.随着生产的需要,对多关节手臂的灵活性,定位精度及作业空间等提出越来越高的要求。多关节手臂也突破了传统的概念,其关节数量可以从三个到十几个甚至更多,其外形也不局限于像人的手臂,而根据不同的场合有所变化,多关节手臂的优良性能是单关节机械手所不能比拟的。
SS系列旋臂式机械手斜臂式机械手主要适用于30-250吨卧式射出成型机的成品或水口取出,上下手臂有单截式和双截式两种,整机上下、引拔、旋出、旋入均为全气压驱动,经济实惠型机械手.可提升产能(10%-30%)、降低产品不良率、节约人工、保障操作人员的安全性.
特点:
1、全机采用铝合金精密铸造,轻巧、耐用;
2、引拔臂和上下手臂采用高强度铝合金结构粱配合进口的高刚性精密线性滑轨,运行平稳,噪音低,磨擦低,经久耐用;
3、超薄型夹具,适合开模距离小的模具,霍尔式夹取确认,灵敏可靠;
5、预留真空吸取功能,可同时吸夹产品,适合两板模取出;
6、选用双截式手臂,特殊的倍速结构设计,大幅度缩短上下手臂的结构高度,缩短取出时间,,增加稳定性,适用于较低的厂房;
7、具有外部输出点,可控制输送带、承接台等辅助设备;
8、可选购CE机型,符合EUROMAP/SPI的标准及配置标准接口。
AX系列立式注塑机专用机械手臂
手臂使用线性滑轨搭配铝合金挤型梁,左右旋转更换容易,也可选择无左右旋转,夹具可选购180度旋转,连杆式夹具,挟持力.
特点
1、掌上型控制系统对话式操作,可以切换中文或英文页面,操作简单易学习,不占空间。
2、八组内建标准程式,可储存12组教导程式,可以满足生产形式及需求。
3、50组模具记忆功能,可以节省换模的设定调整。
4、自动侦测故障显示与操作器上,并自动记录方便与故障排除。
5、手动操作时,可以显示所有的输出与输入接点于操作器上,维修方便快捷。
6、LED显示重要讯号,如安全门,开模完,允许关模,顶针,成品检测。
7、备用输出点可以连接其他自动化设备,如输送带,喷离型剂(Silicon)组或是空压剪等。8、自动运转下可以修改各项延迟时间与计数,方便于操作。
9、可选购具CE规格,符合EUROMAP或SPI的规定。
10、可以选择EUROMAP12或者EUROMAP67与成型机连接的标准。
您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN





塑料机械网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码