
今日要闻










推荐展会
更多 > >



推荐专题
更多 > >


沈自所在复杂曲面机器人自动化磨抛加工领域取得新进展
分享:
导读:提出了一种基于六点定位原理的叶片坐标系自动标定方法,实现了航空发动机叶片磨抛加工过程中动态工件坐标系的自动标定。
【塑料机械网 科技创新】近日,中国科学院沈阳自动化研究所在复杂曲面机器人自动化磨抛加工领域取得新进展,提出了一种基于六点定位原理的叶片坐标系自动标定方法,实现了航空发动机叶片磨抛加工过程中动态工件坐标系的自动标定。该研究成果于近期在线发表在计算机/制造领域期刊Robotics and Computer-Integrated Manufacturing。
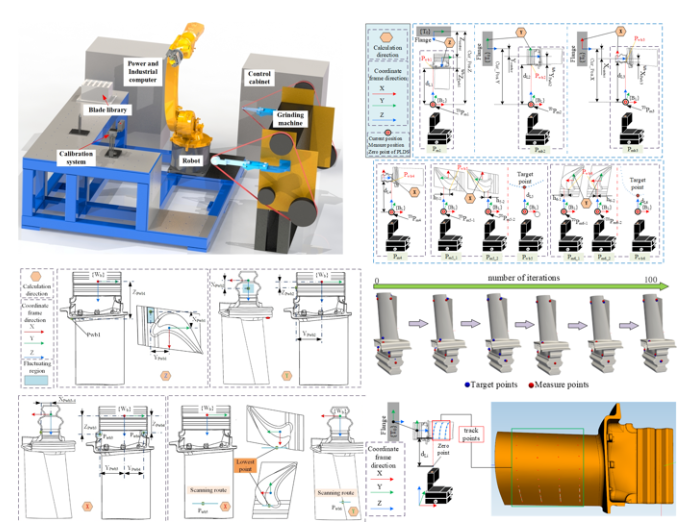
基于六点定位原理的航空发动机叶片坐标系自动标定方法
作为航空装备的核心,航空发动机是一种结构高度复杂且精密的动力机械,被称为“现代工业皇冠上的璀璨明珠”。叶片是航空发动机中最为关键的零部件,其结构复杂,工况恶劣,对加工工艺的要求较高。目前航空叶片的磨抛主要形式是人工磨抛加工和专用磨床磨抛加工。随着工业机器人技术的不断发展,机器人自动化磨抛叶片类复杂曲面已经是一种必然趋势。然而,机器人系统中零件动态坐标系的自动化定位技术尚不成熟,实现航空发动机叶片的高自动化、高精度的磨抛加工具有很高的技术难度。
沈阳自动化所工艺装备与智能机器人研究室基于六点限位原理提出了航空发动机叶片的顺序标定策略,完成了机器人系统中动态坐标系的精准自动标定。结合建立的复杂曲面机器人自动化磨抛系统,研究团队开展了航空叶片的磨抛加工实验。实验结果表明,提出的标定策略可以实现较高精度的机器人系统动态坐标系的自动化标定,将标定精度由传统的人工精度0.2mm提高到了0.05mm,大大提高整体系统的稳定性。
该研究成果得到了国家自然科学基金的支持,并成功应用到了其他复杂曲面的自动化磨抛设备系统中。
版权与免责声明: 凡本网注明"来源:塑料机械网”的所有作品,均为浙江兴旺宝明通网络有限公司-塑料机械网合法拥有版权或有权使用的作品,未经本网授权不得转载、摘编或利用其它方式使用上述作品。已经本网授权使用作品的,应在授权范围内使用,并注明“来源:塑料机械网www.86pla.com" 。违反上述声明者,本网将追究其相关法律责任。
本网转载并注明自其它来源(非塑料机械网www.86pla.com)的作品,目的在于传递更多信息,并不代表本网赞同其观点或和对其真实性负责,不承担此类作品侵权行为的直接责任及连带责任。其他媒体、网站或个人从本网转载时,必须保留本网注明的作品第一来源,负版权等法律责任。
上一篇: 全息视角解码甬华YHII系列注塑机!
猜你喜欢















所有评论仅代表网友意见,与本站立场无关。