

车床机械手手爪联结结构
CNC机械手末端执行器是安装在机器人手腕上用来进行某种操作或作业的附加装置。机器人末端执行器的种类很多,以适应机器人的不同作业及操作要求。末端执行器可分为搬运用、加工用和测量用等。
搬运用末端执行器是指各种夹持装置,用来抓取或吸附被搬运的物体。
加工用末端执行器是带有喷枪、焊枪、砂轮、铣刀等加工工具的机器人附加装置,用来进行相应的加工作业。
测量用末端执行器是装有测量头或传感器的附加装置,用来进行测量及检验作业。




在设计机器人末端执行器时,应注意以下问题;
1.数控车床机械手末端执行器是根据机器人作业要求来设计的。一个新的末端执行器的出现,就可以增加一种机器人新的应用场所。因此,根据作业的需要和人们的想象力而创造的新的机器人末端执行器,将不断的扩大机器人的应用领域。
2.车床机械手末端执行器的重量、被抓取物体的重量及操作力的总和机器人容许的负荷力。因此,要求机器人末端执行器体积小、重量轻、结构紧凑。
3.CNC机械手末端执行器的*性与性是矛盾的。*末端执行器在结构上很复杂,甚至很难实现,例如,仿人的*机器人灵巧手,至今尚未实用化。目前,能用于生产的还是那些结构简单、*性不强的机器人末端执行器。从工业实际应用出发,应着重开发各种的、高效率的机器人末端执行器,加之以末端执行器的快速更换装置,以实现机器人多种作业功能,而不主张用一个*的末端执行器去完成多种作业。因为这种*的执行器的结构复杂且造价昂贵。
4.通用性和*性是两个概念,*性是指一机多能,而通用性是指有限的末端执行器,可适用于不同的机器人,这就要求末端执行器要有标准的机械接口(如法兰),使末端执行器实现标准化和积木化。
5.车床机械手末端执行器要便于安装和维修,易于实现计算机控制。用计算机控制zui方便的是电气式执行机构。因此,工业机器人执行机构的主流是电气式,其次是液压式和气压式(在驱动接口中需要增加电-液或电-气变换环节)。
车床机械手的末端装置,卡爪部分基本上都是属于定制型的,因为大部分客户的工件都是不一样的,而数控车床机械手要实现上下料取料和送料的话,就需要卡爪定制得合理,那么,车床机械手卡爪是如何设计的?数控车床机械手卡爪的设计就需要有适当的夹紧力和有足够的开闭范围。下面就具体分析一下:
1、力求结构简单,重量轻,体积小
车床机械手手部处于腕部的zui前端,工作时运动状态多变,其结构,重量和体积直接影响整个车床机械手的结构,抓重,定位精度,运动速度等性能。因此,在设计手部时,必须力求结构简单,重量轻,体积小。
2、有适当的夹紧力
车床机械手手部在工作时,应具有适当的夹紧力,以保证夹持稳定可靠,变形小,且不损坏工件的已加工表面。对于刚性很差的工件夹紧力大小应该设计得可以调节,对于笨重的工件应考虑采用自锁安全装置。
3、有足够的开闭范围
数控车床机械手夹持类手部的手指都有张开和闭合装置。工作时,一个手指开闭位置以zui大变化量称为开闭范围。对于回转型手部手指开闭范围,可用开闭角和手指夹紧端长度表示。手指开闭范围的要求与许多因素有关,如工件的形状和尺寸,手指的形状和尺寸,一般来说,如工作环境许可,开闭范围大一些较好。温馨提示,本文引用于博立斯“”,更多数控车床机械手、车床机械手、冲压机械手信息博立斯智能装备。
4、手指应有一定的强度和刚度
5、其它要求
因此送料,夹紧车床机械手,根据工件的形状,采用zui常用的外卡式两指钳爪,夹紧方式用常闭史弹簧夹紧,松开时,用单作用式液压缸。此种结构较为简单,制造方便。
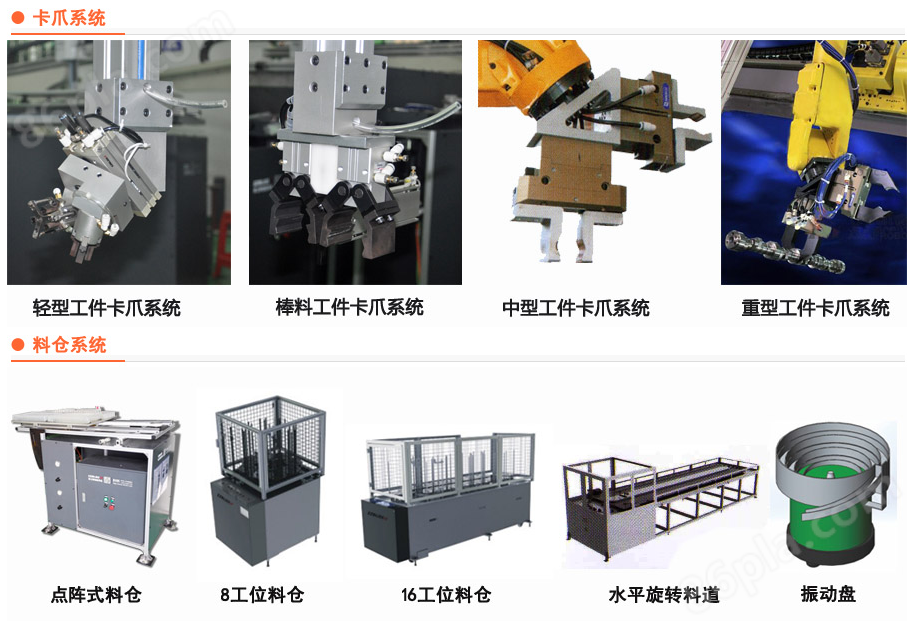
数控车床机械手末端装置包含气动转缸、气动手指及夹具,博立斯根据数控车床加工工件的装夹工艺要求配置的末端装置,可以满足各种轴类工件、圆形工件、环形工件、异形工件及其他特殊工件的快速、精准装夹要求。因为数控车床机械手很多地方都是属于定制型的,因此,车床机械手基本上是没有现货的,都是需要定制的,基本上交货期是在七天以上,具体的以业务员和您洽谈的为准。













