产品|公司|采购|招标
返回产品中心
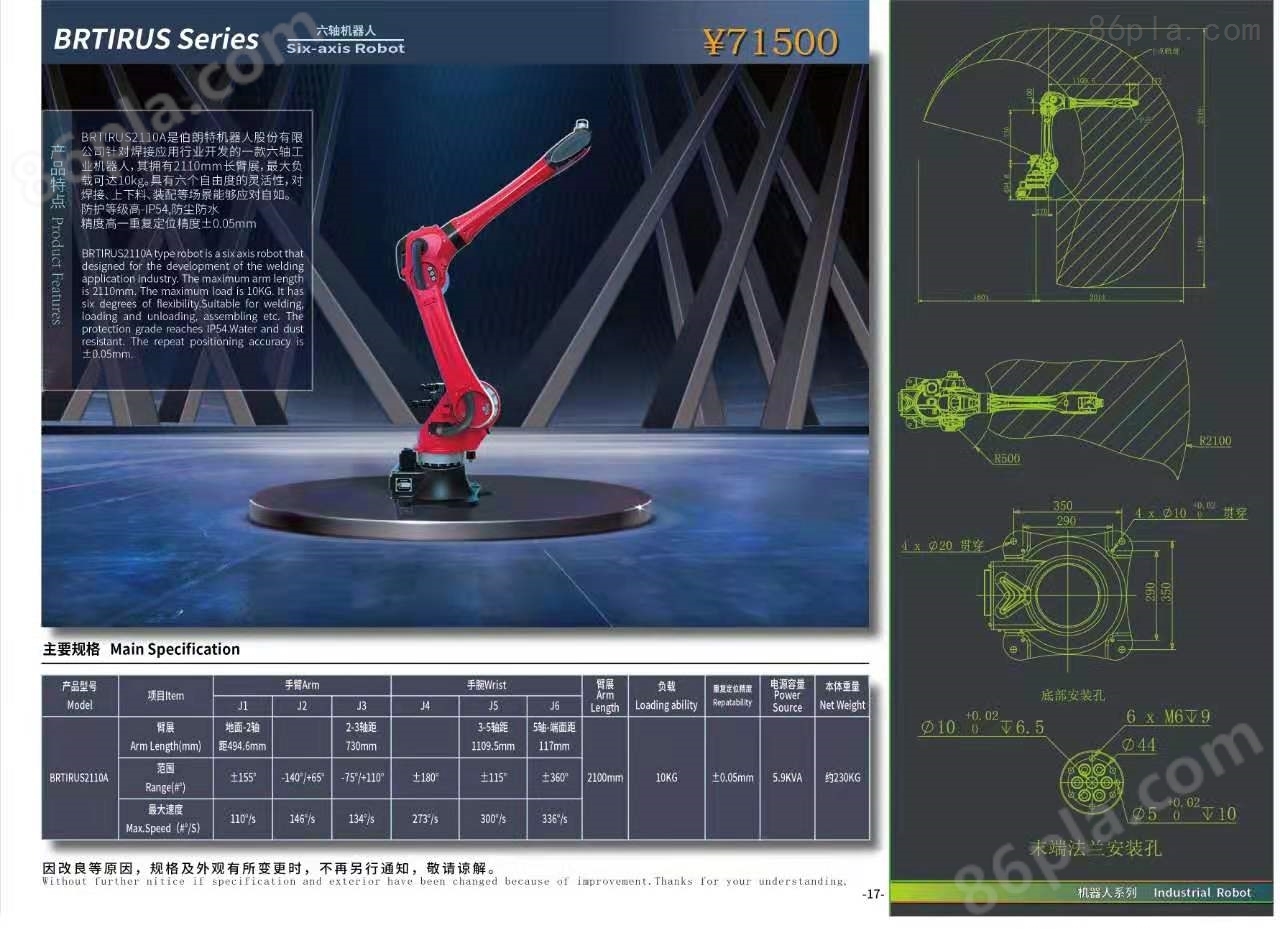
工业机器人
联系方式:153-1887-8619
联系我们时请说明是 塑料机械网 上看到的信息,谢谢!
产品名称价格
批发台达机器人 移动工业机器人
厨具卫浴工业机器人激光焊接机 激光焊接机拆解
机器人安全预警器盒子 工业机器人传感器
北京机械手行星减速机生产厂商销售 注塑工业机
广东松下弧焊机器人TM2000多关节机器手 双臂工
松下机器人TM1400广东松下工业自动化 上下料工
巴鲁夫BES M12MG1-PSC60B-S04G|代理商 喷涂工业
杭州智能卸垛机器人 袋装饲料自动拆垛机 工业机
山东无尘自动拆垛机 化肥智能卸垛机器人 机械臂
袋装水泥自动装车机 自动机械手装车价格 工业机
袋式机器人卸垛机 全自动粉料桁架式拆垛机 工业
50KG袋式机械手拆垛机 智能卸垛机器人 工业机器
码垛机 机器人自动码垛机
重庆高周波厂家制造 六工位机械手生产 服装高频压花机
汽车配件加工三维机器人激光切割系统 管式激光切割机
北京机械手行星减速机生产厂商销售 注塑工业机器人
广东松下弧焊机器人TM2000多关节机器手 双臂工业机器人
松下机器人TM1400广东松下工业自动化 上下料工业机器人
巴鲁夫BES M12MG1-PSC60B-S04G|代理商 喷涂工业机器人
自动箱料桁架式装车机 机械手装车生产厂家 全自动装卸车系统
袋装化肥全自动装车机 智能机器人装车图片 自动装卸车机
杭州智能卸垛机器人 袋装饲料自动拆垛机 工业机器人自动焊接
山东无尘自动拆垛机 化肥智能卸垛机器人 机械臂工业机器人
堆垛机器人哪家好 活性炭智能包装码垛机 包装码垛机械
*您想获取产品的资料:
个人信息:
对比栏
微信公众号
联系方式
山东伯朗特智能装备有限公司
采购或询价产品,请直接拨打电话联系
联系人:
会员登录新用户注册 >
请输入账号
请输入密码
请输验证码


 采用伺服电机配谐波减速机结构,体积小、工作范围大、速度快、精度高、可与转台、滑台输送链系统等辅助设备集成作业。
采用伺服电机配谐波减速机结构,体积小、工作范围大、速度快、精度高、可与转台、滑台输送链系统等辅助设备集成作业。