

概述
该驱动器是为协作机器人一体化关节模组设计的一款全新高性能低压直流全闭环全数字伺服电机驱动器,采用高性能的TI TMS320F28069 DSP芯片作为主处理器,能实现关节模组用无框力矩电机的电流、速度、位置的精确控制,也可以作为外骨骼机器人等对体积有要求的伺服驱动器的使用。
该驱动器的峰值电流可以达到额定电流的三倍以上,具有高动态性能,大的峰值转矩,低速运行平滑,抗力强,同时具备欠压、过压、过载、过流、堵转、Hall或编码器异常、缺相报警等功能。采用CAN、RS232接口实现对驱动器的控制。机械臂关节伺服驱动器性能达到国内外品牌伺服驱动器的水平。
机械臂关节伺服驱动器体积小巧,安装简便,调试简单方便。通过驱动器调试软件,用户可以轻松匹配电机和伺服驱动器的基本参数,更改电机控制模式、三闭环的参数等,实现对电机的精确控制。
指标参数
|
| 参数 | 内容 |
| 1 | 供电电压 | 20-60VDC |
| 2 | 每路输出电流 | 持续电流6A,峰值 18A (后期可升级到持续电流15A,峰值电流45A) |
| 3 | 控制方式 | 串口、CAN总线通讯 支持力矩、速度和位置模式 |
| 4 | 适配电机 | 低压无框力矩电机或其它交流伺服电机、永磁同步电机 |
| 5 | 总线通讯 | CAN总线,支持CANopen 协议(可定制升级EtherCAT,可定制开发) |
| 6 | 异常保护 | 具备欠压、过压、过载、过流、堵转、缺相、HALL或编码器异常等 故障报警输出 |
| 7 | 双编码器 | l 减速机输出端闭环反馈用单圈相对式编码器,编码器20000线 l 机械臂关节端用17位式磁编码器,支持BISS协议,也可以定制支持SSI、SPI、485的值编码器 |
| 8 | 控制器 | 内置梯形加减速曲线,特殊功能定制化服务,形成驱控一体化的产品 |
| 9 | 电磁抱闸控制 | 启动24VDC,保持会降低电流 |
| 10 | 制动电阻 | 支持。大惯量大负载的应用场景,可以外接制动电阻,保护控制器。 |
| 11 | 冷却方式 | 自然冷却或外加散热器 |
| 12 | 防护等级 | IP54(驱动板带外壳、散热板);IP20(驱动板) |
| 13 | 位置误差控制精度 | ±1 Pulse |
| 14 | 速度控制精度 | ±2 rpm(速度闭环模式),在位置模式下,可以实现更好的低速性能,可以一个脉冲一个脉冲地控制转动的角度 |
| 15 | 使用场合 | 尽量避免粉尘、油雾及腐蚀性气体 |
| 16 | 工作温度 | -20℃-70℃ |
| 17 | 保存温度 | -30℃-+80℃ |
| 18 | 工作湿度 | 20-90%RH |
| 19 | 振动 | 5.9 m/s2 Max |
| 20 | 重量 | 0.2kg |
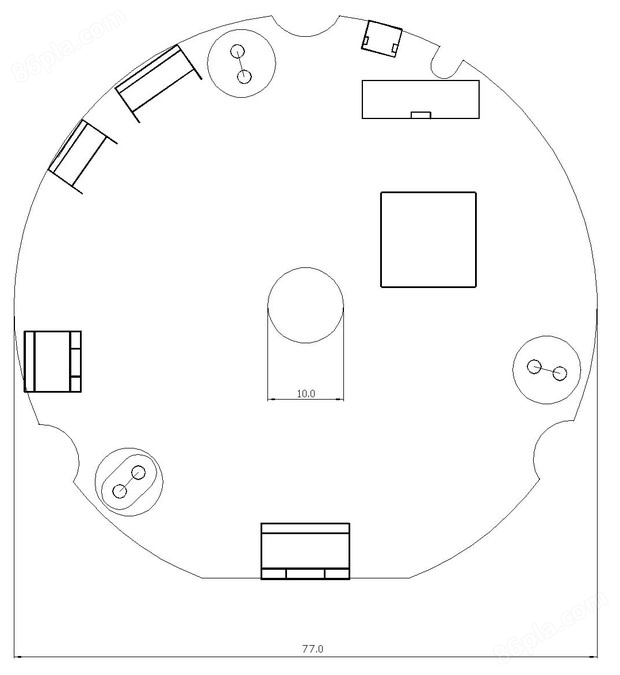
| 安装尺寸 |
电机接口(P8)
| 序号 | 标示 | 名称 | 备注 |
| 1 | U | 电机动力线U 相 | 黄 |
| 2 | V | 电机动力线 V 相 | 绿 |
| 3 | W | 电机动力线 W 相 | 蓝 |
电源接口(P9)
| 序号 | 标示 | 名称 | 备注 |
| 1 | VIN | 输入电源+ | 直流 24V-48V |
| 2 | GND | 输入电源- | |
仿真器接口(P7)
| 序号 | 标示 | 名称 | 备注 |
| 1 | JTAG | JTAG仿真器接口 | 连接XDS100仿真器 |
增量式编码器接口(P1)
| 序号 | 标示 | 名称 | 序号 | 标示 | 名称 |
| 1 | GND | 输出电源地 | 5 | B- | 编码器B 相负输入 |
| 2 | VCC | 输出电源+5V | 6 | B+ | 编码器 B 相正输入 |
| 3 | Z- | 编码器 Z相负输入 | 7 | A- | 编码器 A 相负输入 |
| 4 | Z+ | 编码器 Z 相正输入 | 8 | A+ | 编码器 A 相正输入 |
CAN接口(P3)
| 序号 | 标示 | 名称 | 备注 |
| 1 | CANH | CANH |
|
| 2 | CANL | CANH |
|
式磁编码器接口(P2)
| 序号 | 标示 | 名称 | 序号 | 标示 | 名称 |
| 1 | SL- | 从机数据 | 4 | MA+ | 主机时钟 |
| 2 | SL+ | 从机数据 | 5 | GND | 输出电源地 |
| 3 | MA- | 主机时钟 | 6 | 5V | 输出电源+5V |
自锁接口(P4)
| 序号 | 标示 | 名称 | 备注 |
| 1 | 1 |
| 接电磁开关正 |
| 2 | 2 |
| 接电磁开关负 |






