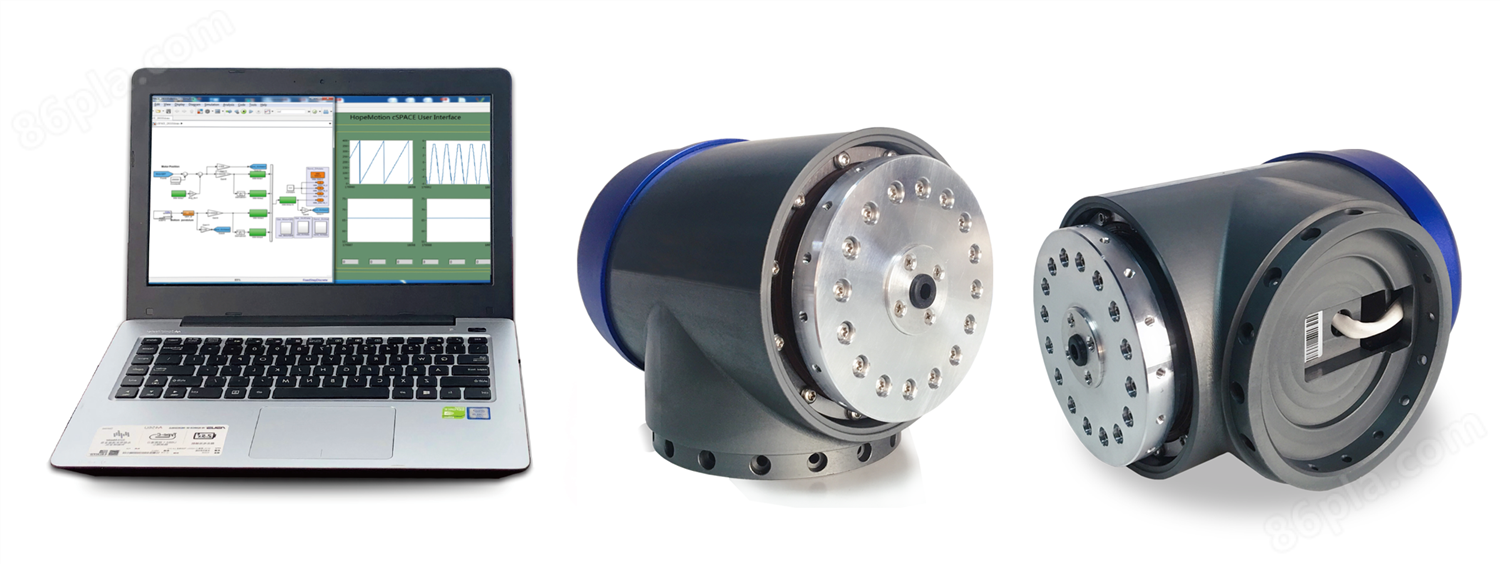
概述
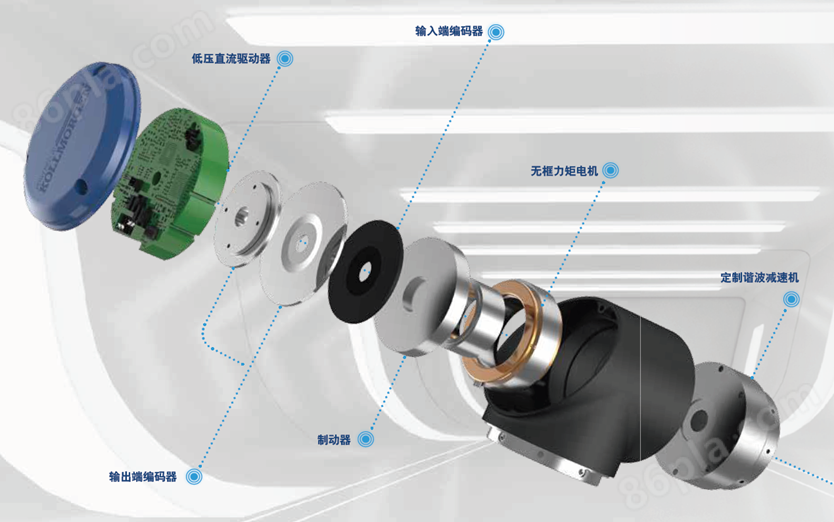
机械臂关节模组由伺服驱动器、无框力矩电机、谐波减速机、光电编码器(减速机前)、值编码器(减速机后,测量机械臂的输出轴的角度)和电子抱闸等多个机器人关节核心部件组成,并集成在一个模块化组件中,封装成适合多轴机械臂的关节,也可以作为其它自动化设备使用。具有传动效率更高,结构紧凑,能实现更大的连续转矩和瞬间扭矩输出,“小身材,大力气”的特点。
结合了合动智能丰富的驱动控制领域经验,机械臂关节模组通过高度集成的机电一体化设计和驱控一体化设计,可以作为工业型、服务型机器人等系统集成商的优选产品。降低客户对机械选型、设计、组装多个环节的人员和时间投入。简化供应链管理及质量管理综合成本。
特点
小巧:符合工业型、服务型机器人结构紧凑、运动灵活的设计特点
轻盈:机电一体化设计、驱控一体化设计,减少机器人关节重量
精确:关节模组输出端重复定位精度0.001º
安全:断电后自动锁住电机轴,关节模组位置锁定
有力:输出连续扭矩为10~200N.m。额定转速可达40RPM,加速度可达10RPS/S
方便:常规为48VDC供电,24~60VDC之间供电可选。满足服务型机器人等电池供电的特点
开放:CAN总线通信(可定制升级EtherCAT),支持大部分主流机器人控制器
定制化开发服务
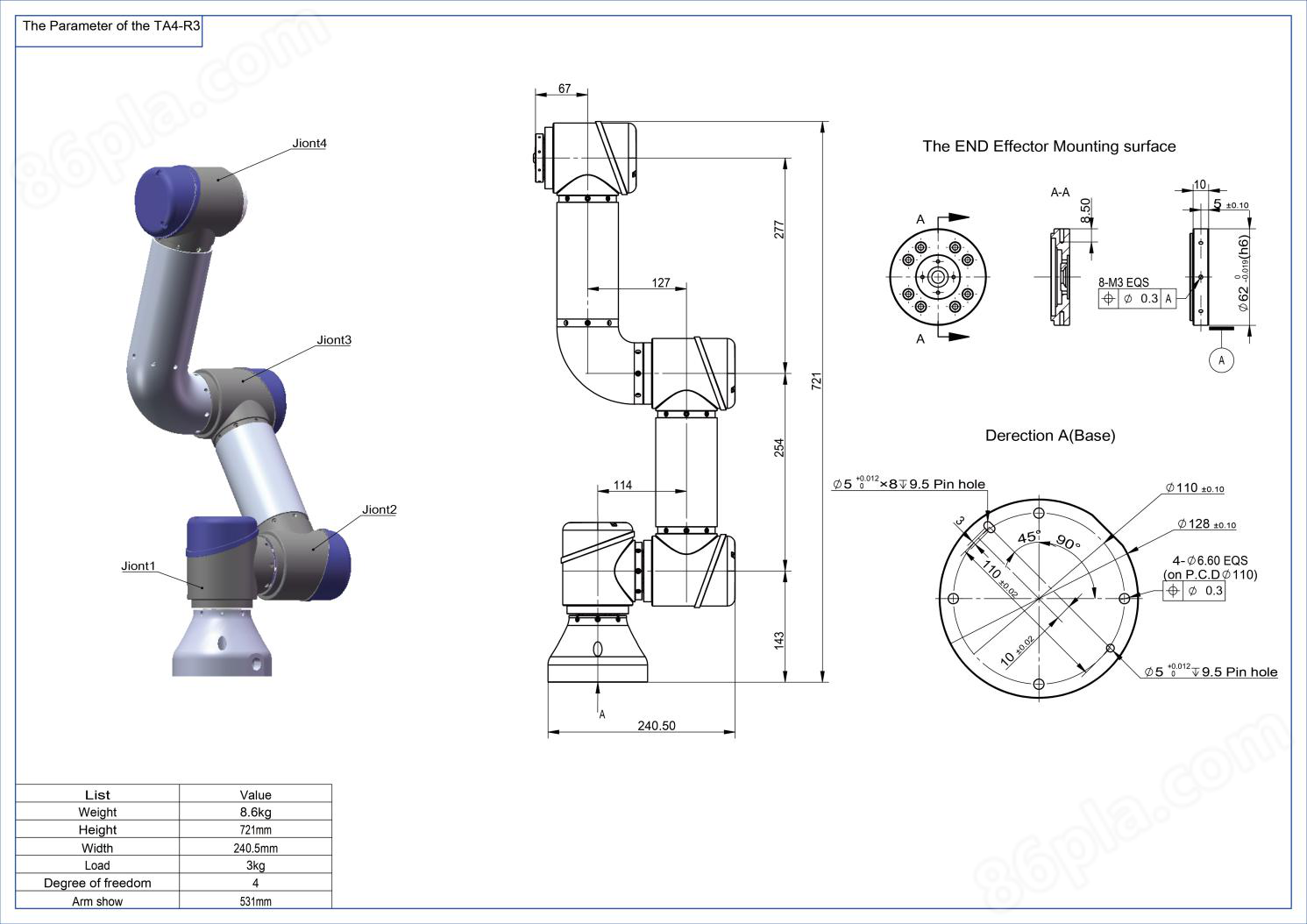
规格参数
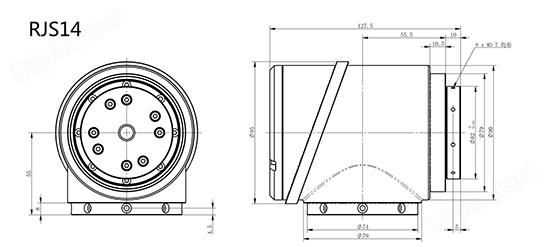
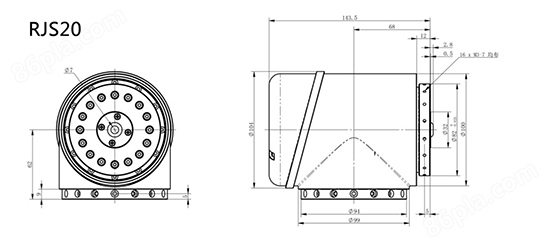
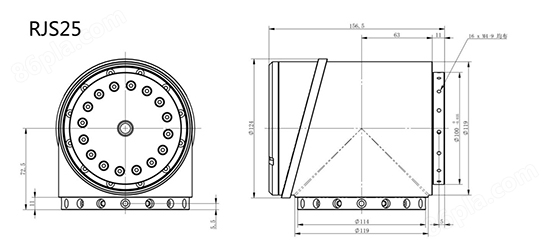
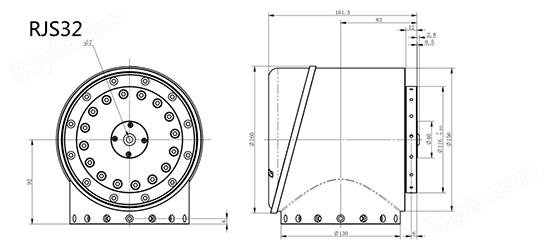
| 参数 | 单位 | HM-RJS14 | HM-RJS17 | HM-RJS20 | HM-RJS25 | HM-RJS32 |
| 关节重量 | kg | 2 | 2.5 | 3 | 4.5 | 7.5 |
| 关节直径 | mm | 90 | 90 | 100 | 119 | 156 |
| 关节高度 | mm | 100 | 104 | 114 | 135 | 172 |
| 关节长度 | mm | 128 | 144 | 144 | 157 | 162 |
| 转动精度 | arcmin | 2 | 2 | 1.5 | 1.5 | 1.5 |
| 额定转速 | rpm | 35 | 30 | 30 | 25 | 20 |
| 许用负载转矩 | N*m | 28 | 54 | 82 | 157 | 333 |
| 平均负载转矩 | N*m | 11 | 39 | 49 | 108 | 216 |
| 瞬时转矩 | N*m | 54 | 86 | 147 | 284 | 647 |
| 增量编码器 | P/R | 2500 | 2500 | 2500 | 2500 | 2500 |
| 值编码器 | Bit | 17/19 | 17/19 | 17/19 | 17/19 | 17/19 |
| 防护等级 |
| IP54 | IP54 | IP54 | IP54 | IP54 |
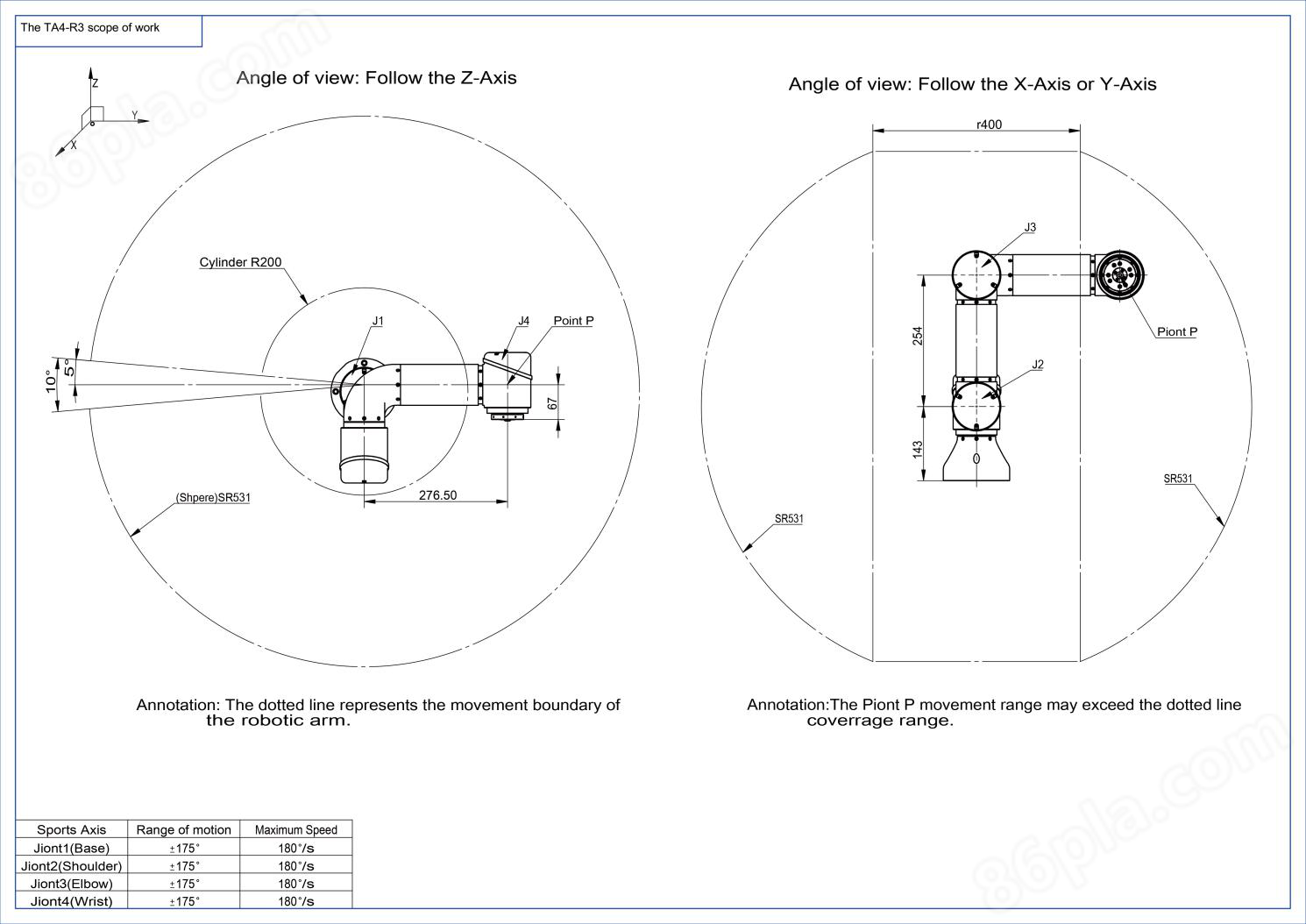
安装尺寸

应用领域
机械臂关节模组适用于有限负载为20kg及以下的服务型机器人、协作机器人及其它轻型机器人,同时关节模组也有应用在外骨骼机器人、医疗机器人等的广阔前景。
消费类电子行业:更加柔性、灵活和高精度地实现组装和搬运
工业生产:物料取放、搬运,上下料,打磨,抛光,喷涂,拧螺丝等
物流:配合视觉系统,实现包裹的分拣,结合AGV,能实现更强的物料拣选和搬运
服务业:一些厨房代替厨师,进行炒菜
医疗康复业:为病人端茶倒水、喂饭等
保洁行业:卫生清洁,以及一些家政服务
快速搭建多轴机器臂