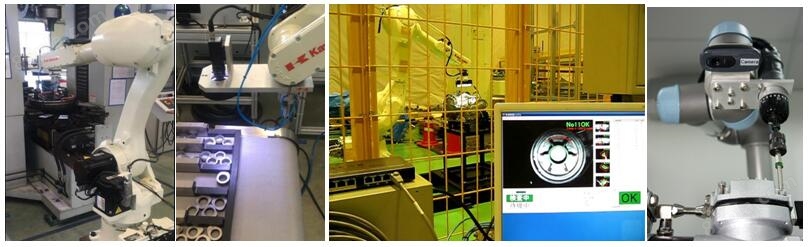
工作原理:利用高清晰摄像头实现对工件或工件上某一点的准确位置、检测目标存在性、装配质量以及产品缺陷进行判断,机器人收到信号后,机器人装上为工件定制的专用抓手抓取工件(或抓取配置设备对工件某点作业),机器人收到完成信号后,继续进行下一步工作。
机器人视觉检测应用特点:
快速判断产品质量,避免人工检测误检或漏检
保证产品质量,提高生产效率
改善工人劳动环境,大幅降低工人劳动强度,可在有害环境下工作
降低了对工人操作技术的要求
缩短了因产品变化带来的设备变更周期,减少投资
使生产流水线更加简单,易于维护
系统结构简单,能在各种机械场合进行应用,满足高效能、低能耗的生产要求