 塑料机械网
塑料机械网









详细介绍
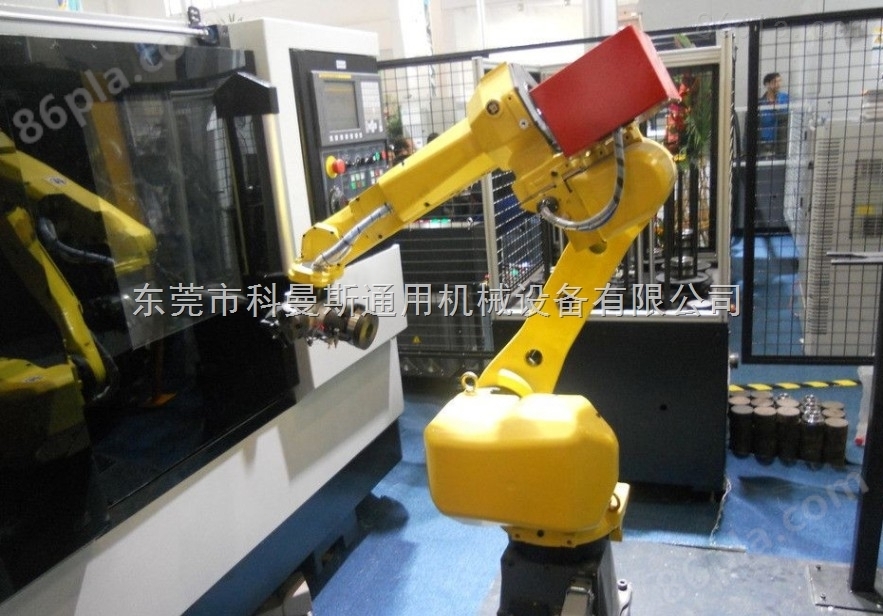
四轴冲压机械手和六轴关节机器人有什么区别?
四轴的冲压机械手和六轴关节机器人自由度不一样。
四轴冲压机械手的手臂部分可以在一个几何平面内自由移动。机械手的前两个关节可以在水平面上左右自由旋转。第三个关节由一个称为羽毛的金属杆和夹持器租成。该金属杆可以在垂直平面内向上向下移动或围绕其垂直轴旋转,但不能倾斜。这种*的设计使四轴冲压机械手具有很强的刚性,从而使他们能够胜任高速和高重复性的工作。在包装应用中,四轴冲压机械手擅长高速取放和其他材料处理任务。
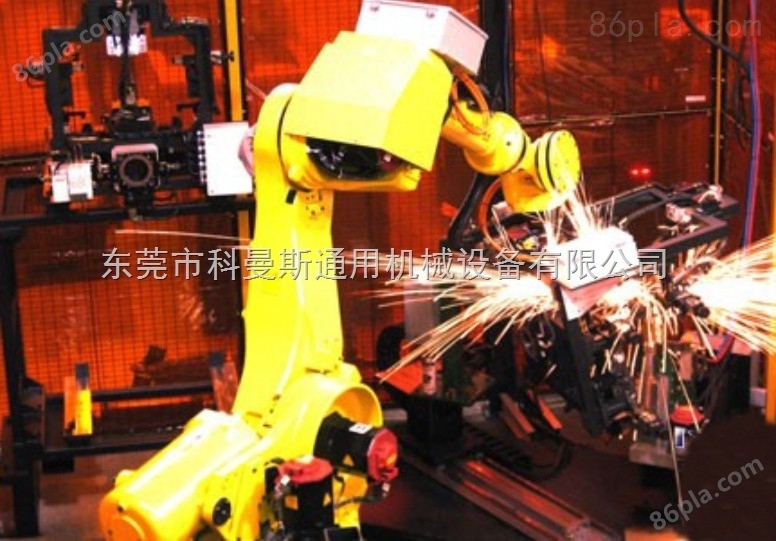
比四轴冲压机械手要多两个关节因此有更多的“行动自由度”。的*个关节能像四轴冲压机械手一样水平面自由旋转,后面两个关节能在垂直平面移动。此外,有一个“手臂”,两个“腕”关节,这让它具有人类的手臂和手腕类似的能力。
六轴机器人可以放置一个对象或结束臂工具在空间中的任何位置(X,Y,Z),他们的工作范围内的信封,并能定向工具或物体在任何方向(横滚,俯仰,偏航)机器人具有7个或更多的运动轴-放置在导轨上的任何上述六轴机器人介绍的第七轴,或自由度。同样的,一个四轴码垛机器人由安装在导轨上的机器人运动的添加,就可以有一个第五轴。导轨安装机器人通常用于装载和卸载多个数控机床与一个单一的机器人。MCRI还用这种安排允许一个单一的机器人堆垛多个SKU,zui多16个在同一时间在一个系统中 可用于伺服控制部分辅助轴控制-控制机器人单元的附加 轴喂养系统,转盘端臂的详情,以及其他的可动负荷的内表面(或外),需要协调与机械手的机器人单元。

 塑料机械网
塑料机械网