注塑机 挤出机 造粒机 吹膜机 吹塑机 吹瓶机 成型机 吸塑机 滚塑机 管材生产线 板材生产线 型材生产线 片材生产线 发泡设备 塑料压延机
菲尔森智能装备(江苏)有限公司

菲尔森智能装备(江苏)有限公司
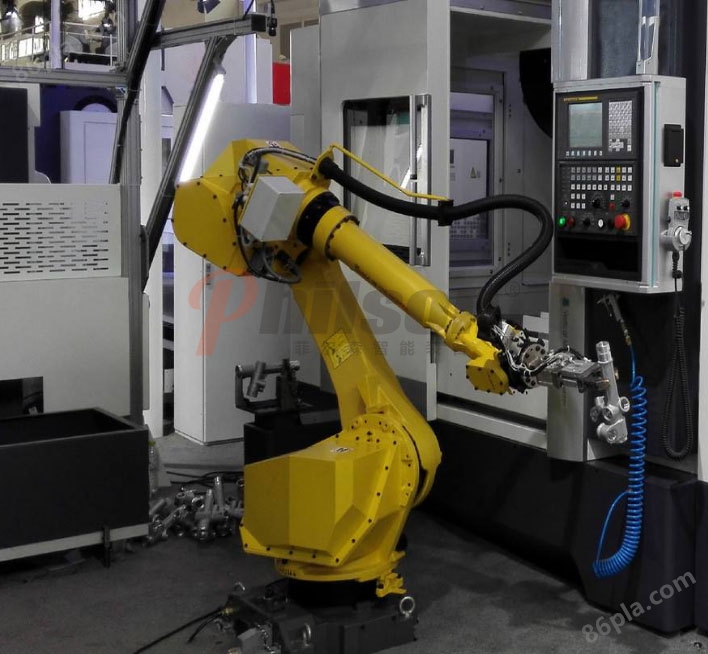
简要描述:工业多关节机械手是一种适用于靠近机体操作的传动形式。 它像人手一样有肘关节,可实现多个自由度,动作比较灵活,适于在狭窄空间工作。...

您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN

磁力研磨设备尽在苏州诺虎免费试麿详细介绍 平移式磁力研磨设备
NF-9808 面议


塑料机械网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码