注塑机 挤出机 造粒机 吹膜机 吹塑机 吹瓶机 成型机 吸塑机 滚塑机 管材生产线 板材生产线 型材生产线 片材生产线 发泡设备 塑料压延机
霸州市子阳机器人科技有限公司

霸州市子阳机器人科技有限公司
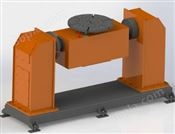
机器人变位机,通过控制工作台的回转,采用传感角度预设并配合脚踏开关,可实现所需要的焊接位置和焊接速度,大大方便人工焊接作业还是自动焊接作业的可控性。本SHH系列工作台均采用伺服调速,调速范围广,稳定可靠。 机器人变位机产品作用 通过改变焊件、焊机及焊接工人的操作位置,达到和保持焊接位置的良好状态
机器人变位机,通过控制工作台的回转,采用传感角度预设并配合脚踏开关,可实现所需要的焊接位置和焊接速度,大大方便人工焊接作业还是自动焊接作业的可控性。本SHH系列工作台均采用伺服调速,调速范围广,稳定可靠。
机器人变位机产品作用
通过改变焊件、焊机及焊接工人的操作位置,达到和保持焊接位置的良好状态;
有利于实现机械化和自动化生产。机器人变位机的主要类型有焊件变位机、焊机变位机和焊工变位机等几种,每种类型又按其结构特点或作用分成若干种类。

机器人变位机选择方法
通常在设计电力驱动的变位机方案时,需要选择从电机到工作台之间的机械传动方式和相应的传动机构。在选择之前须根据装配和焊接工艺过程的特点明确下列要求:
(1)对机器人变位机的功能要求:指变位机械应该能实现什么动作,如平移、升降或者回转等。如果是平移,是直线平移还是曲线平移;如果是回转运动,是连续回转还是间歇翻转等;
(2)对运动速度的要求: 须明确是快速还是慢速,是恒速还是变速,是有级变速还是无级变速;
(3)对传动平稳性和精度的要求:用于自动焊接的变位机,*要求传动具有较高的精度,这时*可以选择蜗杆传动和齿轮传动;
(4)对自锁、过载的保护,吸振等能力的要求 : 一般升降用的或翻转用的以及有倾覆危险的传动,为了**,传动机构须有自锁能力。传动方式和其相应的传动机构可能有多个,这时*要从它们之间的传动功率大小、尺寸紧凑程度,传动效率高低和制造成本来综合考虑后择**定了。

机器人变位机具备性能
(1)机器人变位机和焊机变位机械要有较宽的调速范围焊接运行速度,以及良好的结构刚度。
(2)对尺寸和形状各异的焊件,要有适用性。
(3)在传动链中,应具有反行程自锁传动,以免动力源突然切断时,焊件因重力作用而发生事故。
(4)与焊接机器人和焊接作业配合使用的焊件变位机械,视焊件大小和工艺方法的不同,其到位精度(点位控制)和运行轨迹精度(轮廓控制)应控制在0.1—2mm之间,高精度应可达0.01mm。
(5)回程速度要快,但应避免产生冲击和振动。
(6)有良好的接电、接水、接气设施,以及导热和通风性能。
(7)整个结构要有良好的密闭性.以免焊接飞溅物的损伤,对散落在其上的焊渣、药皮等物.应易被清除。
(8)焊接变位机械要有联动控制接口和相应的自保护功能集中控制和相互协调动作。
(9)工作台面上应刻有安装基线,装各种定位工件和夹紧机构。
(10)兼作装配用的焊件变位机械抗冲击性能。并设有安装槽孔,能方便地按其工作台面要有较高的强度和抗冲击性能。
(11)用于电子束焊、等离子弧焊、激光焊和钎焊的焊件变位机械,应满足导电、隔磁、绝缘等方面的特殊要求。

您感兴趣的产品PRODUCTS YOU ARE INTERESTED IN









塑料机械网 设计制作,未经允许翻录必究 .
请输入账号
请输入密码
请输验证码