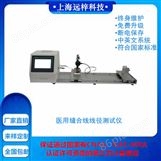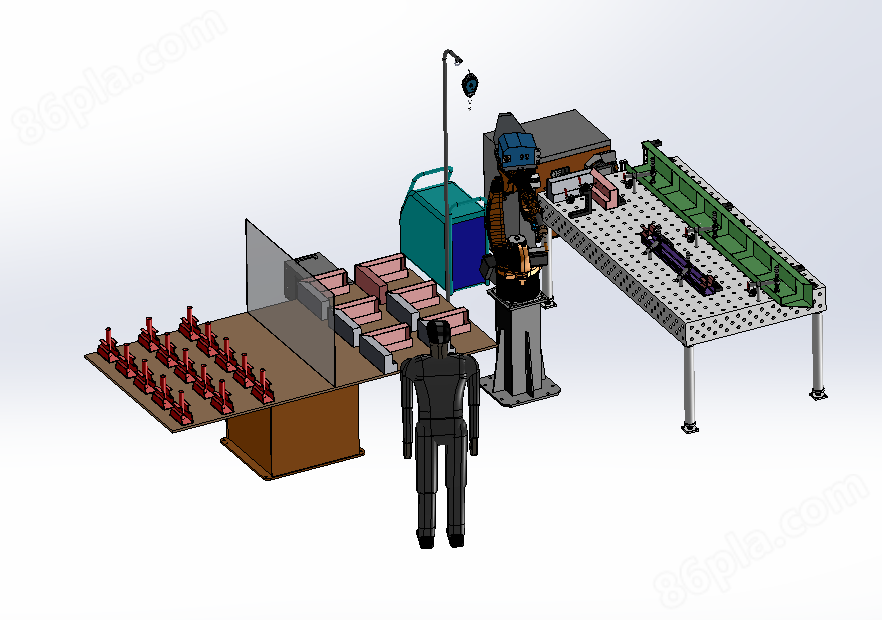
该系统由焊接机器人、焊接电源、、回转变位机、工装平台等组成。
焊接平台工位,人工将共件依次装夹在焊接平台上,人工操作快速夹钳定位夹紧工件,机器人开始焊接。
回转变位机工位,人工将共件依次装夹,回转变位机旋转,机器人开始焊接,焊接同时人工可以在回转盘另一装加工件。
配置表
| 序号 | 名称 | 型号及配置 | 生产厂家 | 数量 | 备注 | |
| 一、机器人系统 | ||||||
| 1 | 弧焊机器人本体 | KR10 | 德国KUKA | 1套 |
| |
| 2 | 控制柜 | KRC4 | 德国KUKA | 1套 |
| |
| 3 | 示教器 | SMART PAD | 德国KUKA | 1套 |
| |
| 4 | 系统连线总成 |
| 德国KUKA | 1套 |
| |
| 二、焊接系统 | ||||||
| 1 | 焊接电源 | Pulse 450 | 芬兰肯比 | 1套 |
| |
| 2 | 送丝机 |
| 芬兰肯比 | 1套 | ||
| 3 | 水箱 | 制冷 | 台州展力 | 1套 |
| |
| 4 | 机器人专用水冷焊枪 |
| RBT | 1套 |
| |
| 5 | 焊枪夹持器 |
| RBT | 1套 |
| |
| 6 | 防碰撞 |
| RBT | 1套 |
| |
| 三、周边设备 | ||||||
| 1 | 柔性工装 |
| 诺博泰 | 1套 |
| |
| 2 | 机器人底座 |
| 诺博泰 | 1套 |
| |
| 3 | STP回转变位机 | 含工装 | 诺博泰 | 1套 |
| |
| 4 | 平衡器支架 |
| 诺博泰 | 1套 |
| |
| 5 | 控制柜放置架 |
| 诺博泰 | 1套 |
| |
| 四、系统控制设备 | ||||||
| 1 | 外部急停控制装置 |
| 诺博泰 | 2套 |
| |